"Parte della bellezza di questo sistema è che siamo davvero in grado di ridurre il calcolo fino ai suoi componenti di base", ha affermato Colter Decker , studente universitario della Rice, autore principale dello studio negli Atti della National Academy of Sciences. Ha affermato che i sistemi di controllo elettronico sono stati affinati e perfezionati per decenni e ricreare i circuiti del computer "con analoghi alla pressione e alla portata anziché alla tensione e alla corrente" ha reso più facile incorporare il calcolo pneumatico.
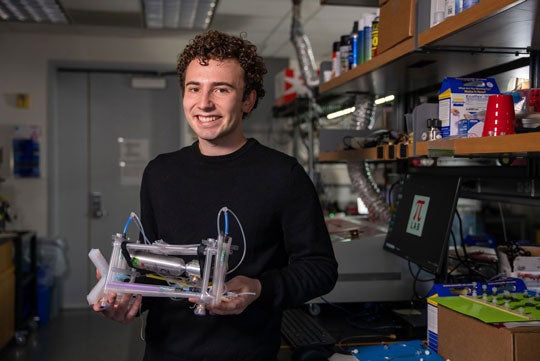
Decker, laureato in ingegneria meccanica, ha costruito il suo sistema di controllo robotico morbido principalmente con materiali di uso quotidiano come cannucce di plastica e elastici. Nonostante la sua semplicità, gli esperimenti hanno mostrato che le porte logiche azionate dall'aria del sistema potrebbero essere configurate per eseguire operazioni chiamate funzioni booleane che sono la carne e le patate dell'informatica moderna.
"L'obiettivo non è mai stato quello di sostituire completamente i computer elettronici", ha affermato Colter. Ha detto che ci sono molti casi in cui robot morbidi o dispositivi indossabili devono essere programmati solo per pochi semplici movimenti, ed è possibile che la tecnologia dimostrata nel documento "sarebbe molto più economica e sicura per l'uso e molto più duratura" rispetto ai tradizionali controlli elettronici.
Da matricola, Decker iniziò a lavorare nel laboratorio di Daniel Preston , un assistente professore di ingegneria meccanica alla Rice. Decker studiò i sistemi di controllo fluidico e si interessò a crearne uno quando vinse una borsa di studio estiva competitiva che gli avrebbe permesso di trascorrere alcuni mesi lavorando nel laboratorio del chimico e scienziato dei materiali di Harvard George Whitesides .
Il progetto si è trasformato in una collaborazione durata mesi tra i due gruppi di ricerca e Decker ha avuto nove coautori dello studio, inclusi gli autori corrispondenti Preston e Whitesides.
Decker e colleghi hanno creato due componenti, un attuatore simile a un pistone che traduce la pressione dell'aria in forza meccanica e una valvola che può essere commutata tra due stati: spento e acceso. I componenti erano costituiti da parti che includevano cannucce di plastica, tubi flessibili di plastica, elastici, carta pergamena e fogli di poliuretano termoplastico che potevano essere uniti con una pressa a caldo da tavolo o un ferro caldo.
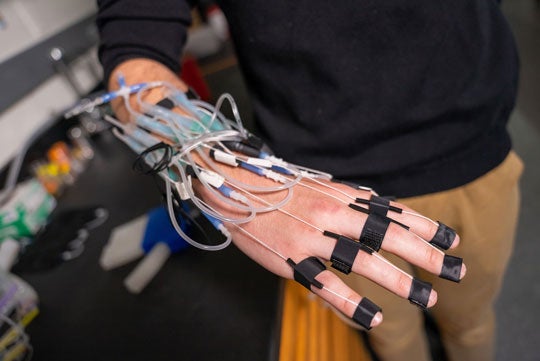
Il team di ricerca ha dimostrato che i due componenti possono essere combinati in un unico dispositivo, una valvola bistabile che funziona come un interruttore e utilizza la pressione dell'aria sia come ingresso che come uscita. È necessaria una quantità specifica di pressione dell'aria per attivare e disattivare l'interruttore. Le valvole sono tenute chiuse da elastici e sono programmate aggiungendo o sottraendo elastici, che cambia la quantità di pressione necessaria per l'attivazione. Nei test, Decker ha mostrato che i circuiti potevano essere utilizzati per controllare un robot morbido a forma di mano, un cuscino pneumatico e un robot delle dimensioni di una scatola da scarpe in grado di percorrere un numero preprogrammato di passi, recuperare un oggetto e tornare alla posizione iniziale.
"Il più grande risultato di questo lavoro è l'incorporazione del controllo digitale e analogico nella stessa architettura di sistema", ha affermato Preston. Avere entrambi significa che i circuiti di controllo pneumatico possono essere programmati digitalmente, con gli “uno e zero che si pensa in un computer tradizionale. Ma possiamo anche introdurre capacità analogiche, cose che sono continue", ha affermato. "Ciò ci consente di semplificare davvero l'architettura generale del sistema e ottenere nuove funzionalità che non erano accessibili in precedenza".
È raro che uno studente universitario sia l'autore principale di uno studio su una rivista prestigiosa come gli Atti della National Academy of Sciences, ma Preston ha detto che il successo di Decker non è stato un colpo di fortuna.
"Gli studenti universitari della Rice sono davvero di prim'ordine e Colter, nel suo caso, è in realtà salito a quello che direi essere il livello di un dottorato di ricerca. studente in termini di alcuni dei suoi risultati come ricercatore universitario", ha detto Preston.
Altri coautori includono Haihui Joy Jiang, Samuel Root, Jonathan Alvarez, Jovanna Tracz e Lukas Wille di Harvard, Anoop Rajappan di Rice e Markus Nemitz del Worcester Polytechnic Institute.
La ricerca è stata supportata dal Dipartimento dell'Energia (DE-SC0000989), dalla National Science Foundation (2144809, 2011754, 2025158), dalla Rice University Academy of Fellows e dall'Harvard University Center for Nanoscale Systems.
Posta un commento
Condividi la tua opinione nel rispetto degli altri. Link e materiale non pertinente sarà eliminato.